



7 * 24
多渠道服务支持
中国仿真学会
中国仿真学会办会宗旨是团结和组织广大仿真科技工作者,以经济建设为中心,促进科学技术的繁荣和发展,促进科学技术的普及和推广,促进国内外学术交流,为广大会员和科技工作者服务,推动我国仿真科学技术发展,为国民经济建设和国防现代化服务。
中国仿真学会成立于1989年11月,是中国科协所属的全国性一级学会,登记管理机关为民政部。学会由全国范围内从事仿真学科的专家、学者、科技工作者及团体单位组成,支撑单位为北京航空航天大学。
目前,学会个人会员2万余人,单位会员97个,下设27个分支机构(23个专业委员会,4个工作委员会)。学会主办国内期刊和国外期刊各1种。近年来,学会主办或联合主办的国内外及港澳台学术会议20余项,其中"中国仿真大会"作为学会最重要学术交流品牌,每年举办一次,会议云集国内仿真及相关领域知名专家及广大科技工作者,已经成为仿真及相关领域层次最高的学术盛会。


谢广明教授
机器人系统仿真专委会
专委会由我国仿生机器人领域著名科学家、北京大学谢广明教授担任主任委员,由西北工业大学太仓长三角研究院常务副院长郑曦、上海交通大学教授(国家杰青,教育部长江学者)张卫东、南方科技大学机器人学院副院长张巍、哈尔滨工业大学机器人研究所副所长姜力、大连海事大学教授徐敏义担任副主任委员,委员来自北大、清华、上交大、浙大、南开、中科大、哈工大、西北工大、南方科大等国内知名院校及中科院沈自所、中科院深圳先进技术研究院、航天二院、航天三院、核工业研究院、深圳鹏城实验室等国内顶尖科研院所,具备一定的行业影响力和广泛的学术资源。
赛事委员会

主席:郑曦
副主席:王滨⽣、朱其新、陈⾔俊、李卫国
委员:贾永霞、章雪挺、王扬、陈尔康、李卫京、尹新彦、夏庆锋、史豪斌、邓彦松
组织委员会

主席:于泓
副主席:王彦峰、姚颖
委员:辛华健、徐娇娇、赵建平、段冠男、荣楠
仲裁委员会

主席:谢广明
副主席:张卫东、姜力、张巍、徐敏义
| 名称 | 单位 |
|---|---|
| Ming Cao 教授 | 荷兰格罗宁根大学 |
| Xinyan Deng 教授 | 美国普渡大学 |
| Ruxu Du 教授 | 香港中文大学 |
| Dongbing Gu 教授 | 英国埃塞克斯大学 |
| Huosheng Hu 教授 | 英国埃塞克斯大学 |
| Wenli Huang 教授 | 美国西点军事学院 |
| Jun Jo 教授 | 澳大利亚格里菲斯大学 |
| Ajay Kottapalli 教授 | 荷兰格罗宁根大学 |
| Jongboo Kim 教授 | 韩国仁德大学 |
| Daniela Rus 教授 | 国麻省理工学院,计算机科学与人工智能实验室主任 |
| Wei Ren 教授 | 美国加州大学河滨分校 |
| Mac Schwager 教授 | 美国斯坦福大学 |
| Yang Shi 教授 | 加拿大维多利亚大学,IEEE Fellow |
| Yuying Yan 教授 | 英国诺丁汉大学,长江学者 |
| Houxiang Zhang 教授 | 挪威科技大学 |
| Jianwei Zhang 教授 | 德国汉堡大学,汉堡科学院院士 |
| 名称 | 单位 |
|---|---|
| 陈化 教授 | 大连海事大学,千人计划专家 |
| 胡震研 究员 | 中船重工集团公司首席专家,深海勇士号总设计师 |
| 姜力 教授 | 哈尔滨工业大学,机器人研究所副所长 |
| 李晔 教授 | 哈尔滨工程大学 |
| 李道亮 教授 | 中国农业大学,长江学者 |
| 潘新祥 教授 | 广东海洋大学,校长 |
| 田国会 教授 | 山东大学,自动化研究所所长 |
| 王龙 教授 | 北京大学,长江学者 |
| 严卫生 教授 | 西北工业大学,航海学院副院长 |
| 俞建成 研究员 | 中国科学院沈阳自动化研究所 |
| 查建中 教授 | 北京交通大学,联合国教科文组织产学合作教席理事 |
| 张爱东 教授 | 香港中文大学,(深圳)机器人研究院院长 |
| 张霖 教授 | 北京航空航天大学 |
| 张涛 教授 | 清华大学,信息科学技术学院副院长 |
| 张卫东 教授 | 上海交通大学 |
| 朱大奇 教授 | 上海海事大学,科技处处长 |
全局视觉组
工程项目组
仿生水中机器人创新组
水中智能装备创新设计组
水下操控组
自主视觉组
水中机器人仿真组
水面机器人组
集群智能算法挑战赛
机器人孪生技术应用组
太空目标监测识别组
智能工厂仿真组
三维数字化机器人设计组
智能交通组
元宇宙创新应用设计组
体育与运动仿真组
机器人格斗与仿真组
工业机器人技术组
Domino创意机器人组
人工智能物流机器人组
仿生视觉机器人组
机器人算法与控制设计组
三维数字化制造组
超轻量机器人服务应用组
重力势能小车仿真与制造组
创新创意组
机器人孪生技术应用组
太空目标监测识别组
智能工厂仿真组
三维数字化机器人设计组
智能交通组
元宇宙创新应用设计组
体育与运动仿真组
集群智能算法挑战赛
机器人孪生技术应用组
太空目标监测识别组
智能工厂仿真组
三维数字化机器人设计组
智能交通组
元宇宙创新应用设计组
体育与运动仿真组
集群智能算法挑战赛
机器人孪生技术应用组
太空目标监测识别组
智能工厂仿真组
三维数字化机器人设计组
智能交通组
元宇宙创新应用设计组
体育与运动仿真组
大赛分为智慧海洋、产教融合、赛教融合、仿真技术、创新创业五大竞赛群共31个组别
在太仓、青岛、合肥、沈阳四地举行,共470学校,2481支队伍参加了比赛。
大赛正式更名为国际先进机器人及仿真技术大赛,面向机器人、人工智能、仿真技术等众多领域开设竞赛项目
采用线上线下结合的方式比赛,现场赛在太仓市与西北工业大学长三角研究院联合主办,参赛规模创历史新高,入选高等教育学会学科竞赛排行榜观察目录。
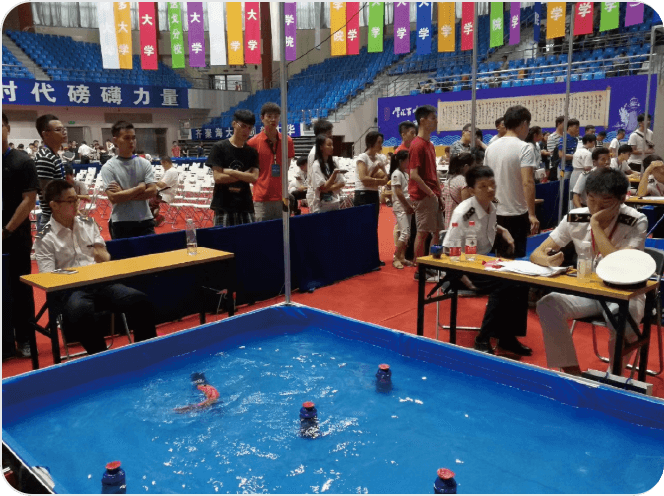
大连和青岛,来自国内外上百所高校的超过两千名学生,参加当年举办的国际水中机器人大赛。
合肥,举办2017国际水中机器人大赛,新增企业赛、南艳湖水面垃圾清理赛等创新赛项。
北京亦庄,举办2016国际水中机器人大赛,同时是2016世界机器人大会的重要组成部分。
兰州, 举办2015国际水中机器人大赛,国内外64所高校约600人参赛。
北京,国务院新闻办公室,成功召开了国际水中机器人大赛新闻发布会。潮州,举办了2014国际水中机器人大赛,国内外的56所高校和科研机构的约500人参赛。
宁波,举办了首届国际水中机器人大赛,央视《新闻联播》再次报道了赛事情况。
南京,举办了中国水中机器人大赛暨首届国际公开赛,美国西点军校首次派队参加比赛。
成都,举办了中国水中机器人大赛暨首届国际邀请赛,首次有国外队伍参加比赛。
山东,举办了中国水中机器人大赛暨第三届水中机器人技术研讨会,《兵工自动化》首次组织了水中机器人技术专题。
太原,举办了中国机器人水球冠军赛。
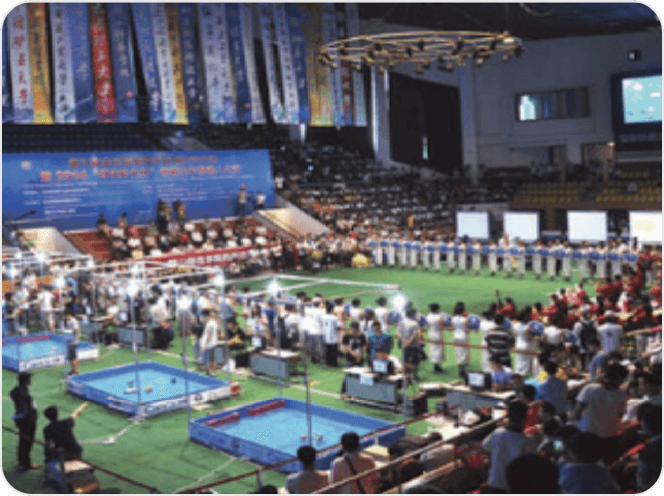
苏州,水球比赛成为RoboCup国际机器人大赛的表演项目。央视的《新闻联播》报道称水球比赛为“世界机器人赛事中的首个中国标准”。
济南,水球比赛作为中国机器人大赛的竞赛项目首次亮相。被各大媒体报道,受到热烈好评。
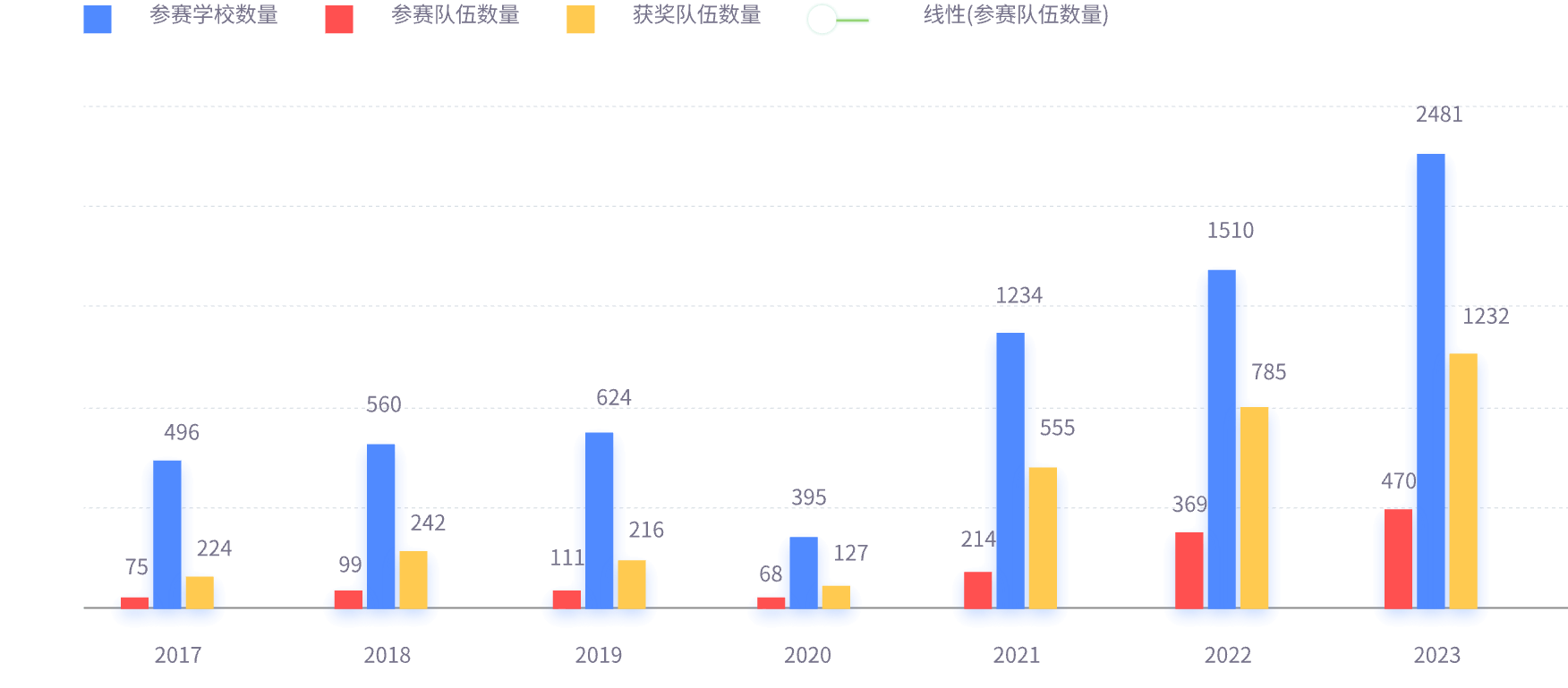
近年参赛队伍数据
大赛吸引了包括美国西点军校、美国布朗大学、荷兰格罗宁根大学、英国埃塞克斯大学、加拿大多伦多大学、北大、清华、上海交大、复旦等在内多家高校参与,并被“新闻联播”“朝闻天下”“新闻直播间”等媒体重点报道。




赛道目的
随着人类航天活动的日益频繁,地月空间环境日趋复杂。除了正常运行的卫星外,火箭残骸、碎片等太空垃圾的数量也在急剧增加,给太空交通带来了极大的困扰和安全隐患。为了有效管理和指挥太空交通,我们需要不断采集和整理这些太空目标的数据。因此,本次大赛旨在为国家培养航天人才,提高参赛者在太空目标识别、数据分析和处理等方面的能力。
1. 培养具备航天背景的人才:通过本次大赛,选拔和培养一批具备航天背景的人才,为国家航天事业的发展提供有力的人才保障;
2. 提高参赛者技术水平:通过实际操作和竞赛,提高参赛者在航天技术、数据处理和分析等方面的技术水平,增强其解决实际问题的能力;
3. 促进航天技术的创新和发展:通过本次大赛,鼓励参赛者进行航天技术的创新和探索,推动我国航天技术的进一步发展;
4. 增强社会对航天事业的关注度:通过本次大赛的宣传和推广,提高社会对航天事业的关注度,激发更多人投身于航天事业中。


赛制及比赛规则说明
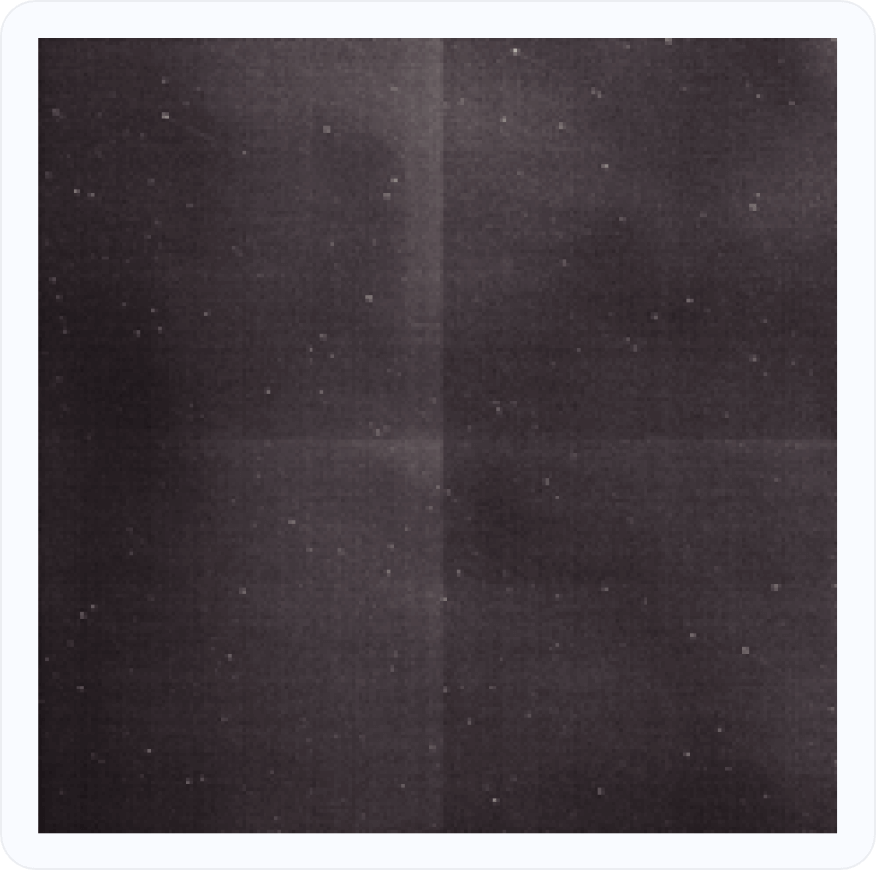
比赛采取排位赛制,依据所有参赛队伍的最终得分进行总排序,以排位顺序作为划分奖项的依据。参赛队需根据大赛所提供的15张太空数据照片(可参考下图),完成星图识别与星图分析两个基础比赛内容。
其中星图识别内包含星点识别和星等识别两个选项,参赛队使用15张图片中指定的1张图片进行比赛,星点识别即通过方法从图片中找出所有星点并计算出星点总数;星等识别即通过方法找出图片中亮度最低的星,并标注出该星的星等。参赛队可根据自身学科特点去选择其中一项或全部完成,完成需提交思路及算法;星图分析主要内容为动目标识别,即通过方法从给出的15张图片中找出其中的多个运动目标,完成需提交思路及算法。
在基础比赛内容完成后进入创新板块,参赛队根据大赛提供照片与团队能力,从中提取计算分析出其他有用数据。
根据作品的科学性、创新性、实用性和其他独特之处等方面,对参赛作品打分,总分100分。各部分分值分配如下:
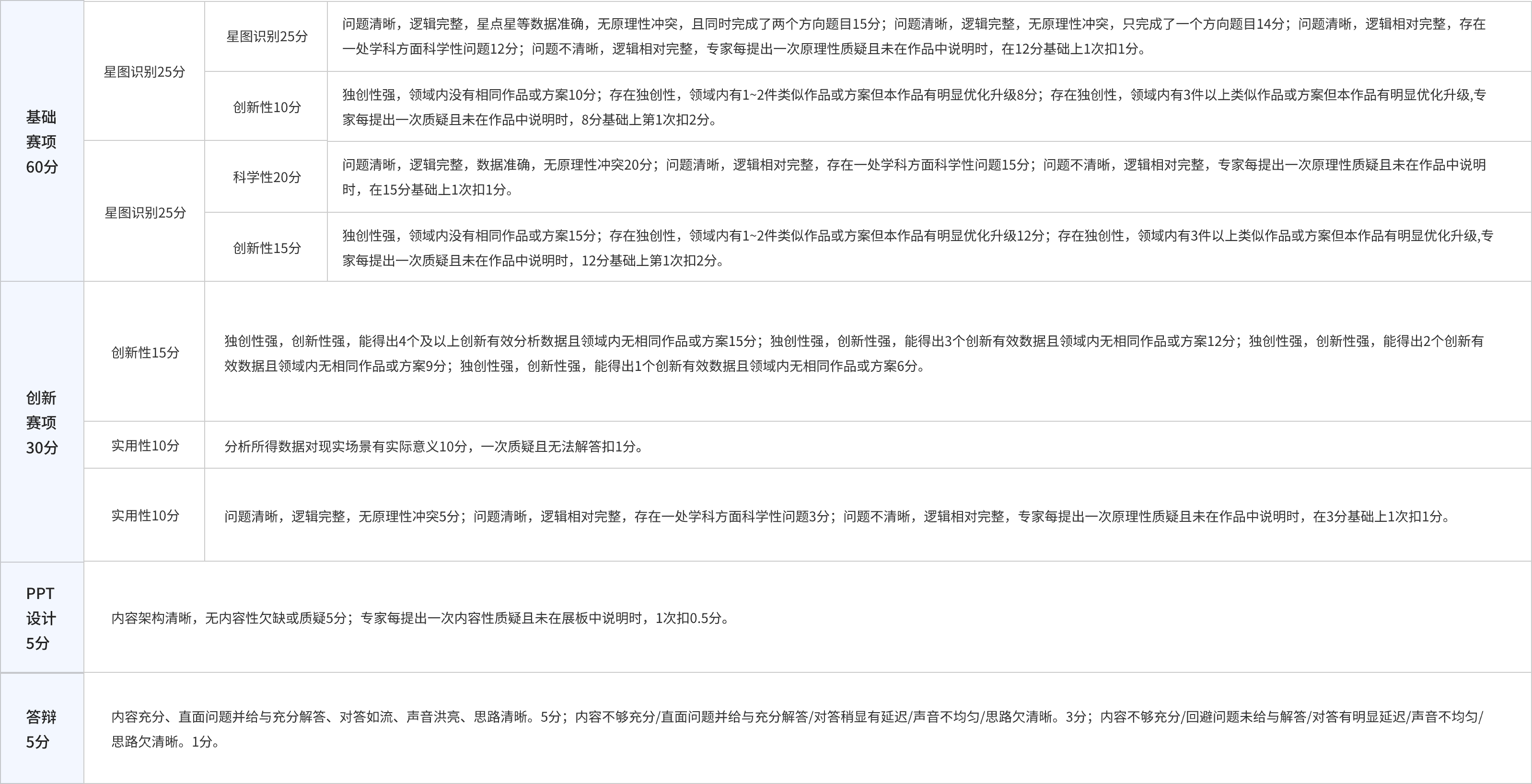

现场答辩,评委根据裁判规则,按照评分表四项标准进行打分。参赛队伍提交作品包括:方案介绍 ppt,运行程序,运行视频,源代码。

线上评审,评委根据裁判规则,按照评分表的前两项(基础赛项、创新赛项)标准进行打分。参赛队伍提交作品包括:方案介绍 ppt,运行视频。

适合参赛专业:天文、天体物理、航天、图像识别等。每支参赛队伍最少3名学生及1名指导老师成队,其中1名队员任队长。

7 * 24
多渠道服务支持

专业服务
云业务全流程支持

值得信赖
可以依赖的合作伙伴

专属贴身服务
1V1贴身服务,专属保障

建议反馈
优化建议反馈
