太空报告 | 星链STARLINK-32913卫星观测报告
 、
、1、STARLINK-32913卫星卫星信息介绍及近期事件。
2、STARLINK-32913卫星于2025年03月06日进行跟踪观测,共采集图像96张,星等变化范围4.24-7.34,符合光照变化规律,定位结果与预测位置相符。
3、STARLINK-32913卫星未来三天无交会事件,无碰撞风险。
摘要
目录
一、 目标基本信息
1. 目标基本信息
2. 近期事件
3. 轨道信息
二、 观测报告
1. 实测情况
2. 目标过境位置分析
3. 光度变化分析
4. 分析结论
5. 未来三天在北京市的全部过境情况
三、 碰撞预警报告
1. 交会事件分析
四、 附录
1. 卫星相关报道
2. 着陆船介绍
一、目标基本信息
1. 目标基本信息
STARLINK-32913卫星是二代星链Mini版,属于星链星座。于2025年2月23日01:38 UTC(太平洋标准时间2月22日17:38),由SpaceX猎鹰9号运载火箭从加利福尼亚州范登堡太空部队基地发射台4(SLC-4E)发射升空。本次发射共向近地轨道发射了22颗Starlink卫星(Starlink-236/Starlink 15-1)。在级间分离之后,猎鹰9号的第一级降落在驻扎在太平洋的“我当然仍然爱你”无人船上。猎鹰9号的第一级(B1082)以前支持10次任务:USSF-62、OneWeb 20和8次Starlink任务。
项目 | 内容 |
目标编码 | 63098 |
目标名称 | STARLINK-32913 |
国际卫星标识符 | 2025-037X |
所属国家 | 美国 |
发射站 | 美国加利福尼亚州空军西部试验场 |
轨道状态 | 在轨 |
轨道中心 | 地球 |
目标类型 | LEO |
载荷类型 | 通信 |
2. 近期事件
2025年2月23日01:38 (UTC),由SpaceX猎鹰9号运载火箭从加利福尼亚州范登堡太空部队基地发射升空。
3. 轨道信息
轨道基本信息表:
轨道偏心率 | 0.0004169 |
升交点赤经 | 219.6038° |
近地点高度 | 292.987 km |
远地点高度 | 298.552 km |
轨道倾角 | 69.9922° |
近地点幅角 | 277.6823° |
每日圈数 | 15.923215 |
轨道高度 | 292.987 km x 298.552 km |
STARLINK-32913卫星轨道图(aseem.cn):
星链星座图(aseem.cn):
二、观测报告
本报告观测信息为使用aseem.cn观测网络对目标进行观测,分析观测结果形成观测报告。
1. 实测情况
观测时间:2025年03月06日22:36:27至22:37:36 (UTC)
观测设备:光学望远镜
观测站:007号站
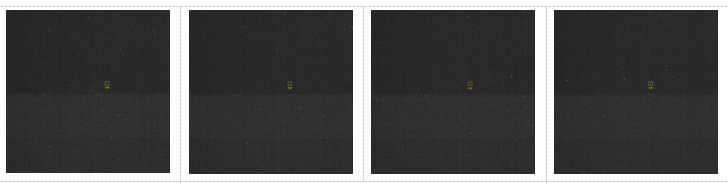
观测数据:共获取卫星轨道图像96张。
观测数据下载地址:联系本公司获取
观测数据影像图:

定位数据见附录:定位数据。
2. 目标过境位置分析
2.1 过境预报预测卫星过境位置
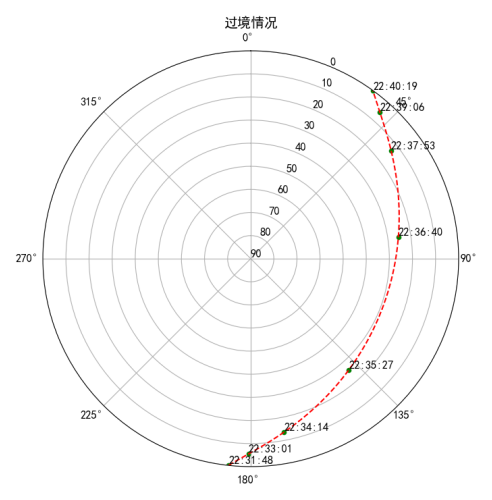
2.2 过境位置预测和实际观测结果
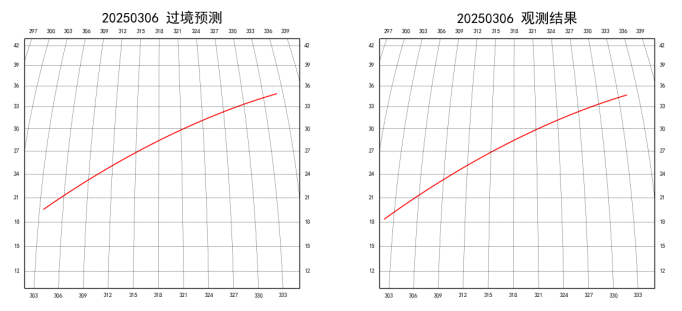
过境预测和观测结果对比(RA,DEC):
红色:过境预测
绿色:观测结果
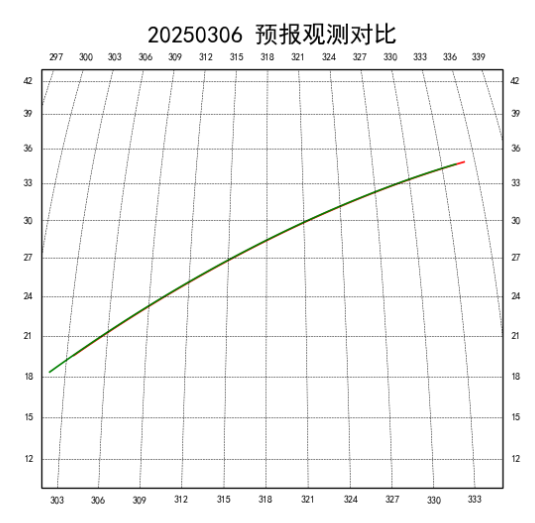
观测结果和过境预测的数据结果如上图所示,通过对比观测的预计目标出现在天球上的位置和实际拍摄定位出的位置结果,可以得知观测期间,目标位置符合预期结果。位置无明显变化。
对于图像中观测弧段比预报弧段更长或更短的情况,主要原因如下:
观测弧段长:实际观测时,设备有一定时间的提前量在升起位置等待,会出现观测的初始位置轨迹长于预期观测轨迹。
观测弧段短:主要原因是由于在拍摄时天空有云或者天光质量不好,导致看不到目标或者只有一段能够看到目标,对拍摄图像处理过程中会有有识别失败的情况发生,将会导致结果的长度比预期的短。
根据两张图像可以看出,在相同时间点的位置基本吻合。
综合以上分析,在观测期间目标轨道实际测量位置和预期位置基本保持一致,目标轨道无明显异常或变轨行为。
3. 光度变化分析
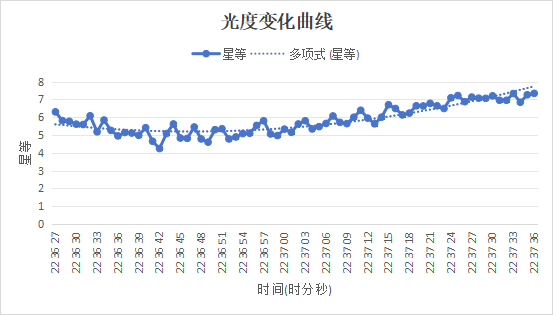
变化的范围:图中观测显示的总体的星等值在4.24到7.34之间,这种总体变化范围相对较小,星等值相对稳定。
变化的趋势:光度曲线星等值总体呈现出先下降后上升趋势,趋势变化明显。符合随目标运动,观测站与卫星、太阳夹角的变化规律。
综合以上分析,根据目前提供的光度变化曲线图和图像可知,卫星亮度出现浮动。观测时有薄云,对亮度测量有一定影响。卫星星等值总体变化范围较小,相对稳定,总体变化呈现出先下降后上升趋势,符合卫星随着光照角度的变化规律。
4. 分析结论
项目 | 分析结果 |
轨道位置 | 通过对卫星轨道图像的测量,计算出卫星在轨道上的精确位置。数据显示,卫星轨道位置与预期轨道位置基本一致,未发现明显偏差。 |
卫星亮度 | 卫星星等值变化范围较小,相对稳定,总体变化呈现出先下降后上升趋势,符合卫星随着光照角度的变化规律。 |
结论:该目标轨道稳定运行。后续正常观测。
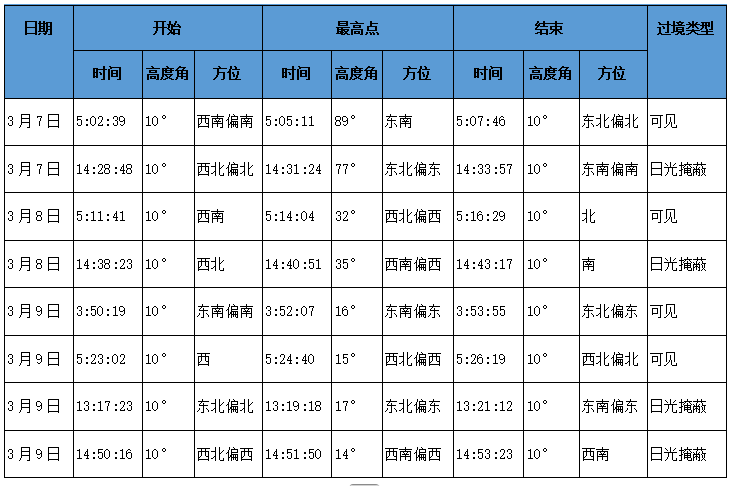
5. 未来三天在北京市的全部过境情况
过境信息依据aseem.cn轨道数据库和aseem.cn观测网观测数据库分析目标未来三天经过观测站的天域过境情况。
未来三天:2025年03月07日 至 2025年03月09日。
三、碰撞预警报告
1. 交会事件分析
1.1 概括
太空目标STARLINK-32913近期无碰撞预警事件
1.2 碰撞概率大于1E-4的风险事件统计
无
1.3 碰撞概率大于1E-6的风险事件统计
无
四、附录
1. 卫星相关报道
星链STARLINK-32913卫星发射

星链STARLINK-32913卫星发射后一级火箭回收
2. 着陆船介绍

“当然我还爱你”(OCISLY)无人船是SpaceX公司在加州长滩港运营的自主太空港无人船(ASDS)。OCISLY无人船之前在2015年至2021年期间驻扎在佛罗里达州卡纳维拉尔港。这艘无人船是在一艘改装过的驳船上建造的——Marmac 304——并以作家伊恩·m·班克斯(Iain M. Banks)系列小说《游戏玩家》(The Player of Games)中的一艘同名飞船命名。
OCISLY无人船是一艘改装的驳船,配备了一个大型着陆平台、空间站保持推进器和其他设备,使SpaceX公司能够在无法携带足够燃料的高速任务中将猎鹰助推器降落在海上,以便返回发射场着陆。
OCISLY于2015年初在路易斯安那州开始建造,并于当年6月在佛罗里达州投入使用。改进包括扩大甲板以增加着陆区域的大小,在每个角落安装四个推进器发动机,以便无人船能够自主保持其在海上的位置,以及防爆屏蔽以保护前后的电气,发动机和其他地面支持设备。
“当然我仍然爱你”上的四个方位推进器部署后,可以让无人船在海上保持精确的位置。埃隆·马斯克此前曾表示,即使在风暴条件下,无人船也能够将目标位置保持在3米以内。据报道,无人船可以自主保持其位置,或者由支援船上的操作员远程控制。
这艘无人船配备了摄像头、传感器和其他测量设备,使SpaceX能够监控和收集着陆时的数据。有几次表明,这些相机可以在着陆过程中远程调整和移动,以提供更好的视角。
“当然我仍然爱你”装有多个卫星天线,包括“星链”碟形天线,用于数据上行和与即将到来的助推器通信。无人船还配备了远程操作的消防软管,在无人船着陆失败导致爆炸或火灾的情况下,可以迅速将无人船淹没在水中。
一个机器人——官方名称为猎鹰9号安全机器人——但通常被称为Octagrabber,生活在无人船上,并在助推器着陆后不久部署。这个机器人从它的防爆掩体中被远程操控,并被安置在猎鹰9号的下方。然后,机器人的四只手臂可以抬起并锁住猎鹰9号的八爪网,利用猎鹰9号火箭的低重心和空油箱,确保助推器的运输。
虽然众所周知,SpaceX正在积极努力使其无人船舰队完全自主,但“当然我仍然爱你”无人船还没有在长距离上展示自主能力,而只是在着陆尝试期间使用该技术来保持位置。为了到达下行着陆区,OCISLY由一艘来自长滩的租船拖曳。着陆区的确切位置取决于任务要求和法规变化。
OCISLY和拖船通常会在发射日期前五天离开港口,其他随行的支援船会在晚些时候离开。到达着陆区后,推进器和其他设备将投入使用。支援船和拖船将撤退到安全距离观察登陆。“当然我仍然爱你”在所有着陆期间都是无人驾驶的。
一旦着陆完成,Octagrabber将被部署以确保助推器的安全,SpaceX的技术人员将断开推进器,为无人船返程做准备。然后拖船将把OCISLY拖回港口卸载助推器。

欢迎您访问Space Mapper—太空地图(spacemapper.cn)!在这里,您可以免费下载获取更多报告。现在加入我们的会员,即刻解锁更多太空数据、轨道计算算法和太空数据仿真功能。限时免费开放会员注册,扫描下方二维码即刻体验!